Today, i’ve received the first unit of the new series of tracking devices which will be used for material and vehicle tracking. With its autonomous operation of roughly 60 days and various sensing capabilities, like movement and shock it’s ideally suited for this purpose.
However it’s an nice example, how long actually technology trigger need until systems finally reach the broad marked.
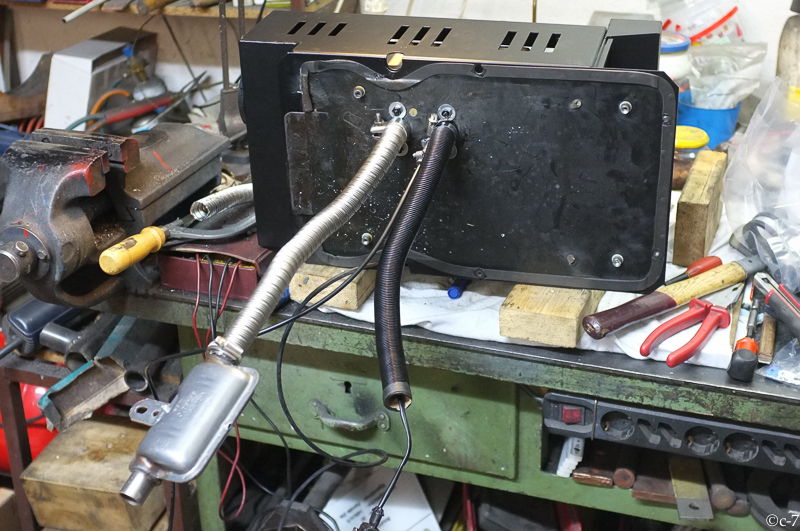
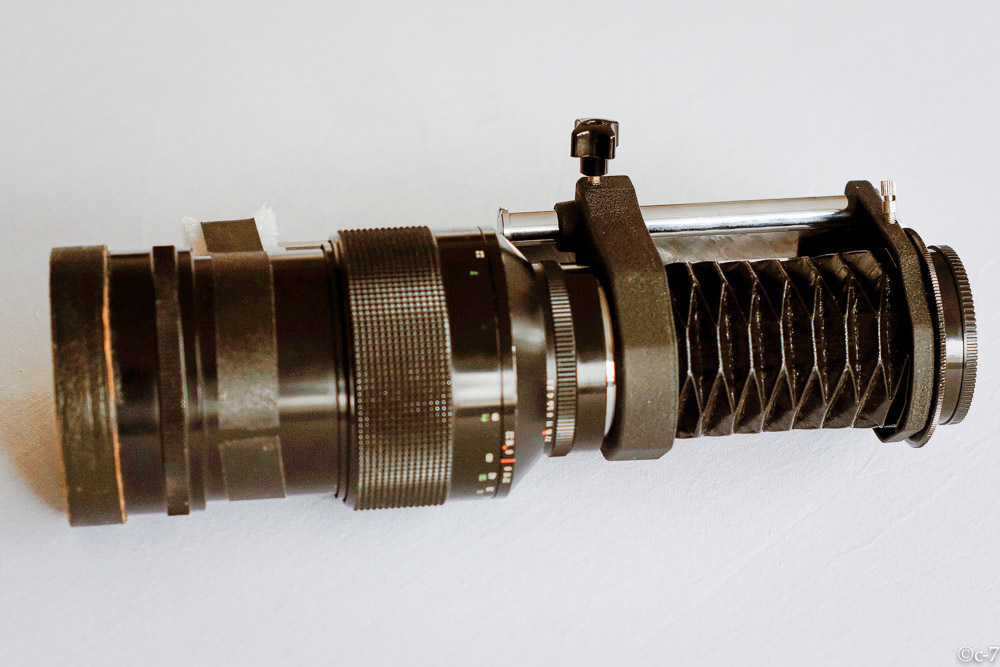
Below is a picture of main tracking unit of the system which I developed and prototyped almost 20 years ago. It was called TaPos – the German acronym for “Teilautonomes Positionserfassungssystem” (if you are interested in details, you may find the project description in the www – in German).
Ok, the form factor of the main tracking unit is different but it had exactly the same – to be precise, even more – features.
It was the innovative prototype of an vehicle, container tracking and logistics management system which also would have helped to optimise traffic flow and reduce the carbon (co2) emission. However, at this time (before the Internet hype) it was nearly impossible to find risk investors in Germany for innovative solutions.
An request for support through an innovation funding programme was technically analysed as future oriented system but no financial commitment was made at the end of the day (after many good words and long delay of almost three years).
For those who don’t remember the technology landscape in 1996:
Linux is already 4 years old, in 1996 kernel version 2.0 was published, Php was one year, Version 2 was about to be published.
Eight years before google maps started 2004, TaPos used a public available sub-set of the US DoD digital chart of the World, transformed from file-structure-data onto an DBase like database for fast access.
SIEMENS just released (expensive) GSM engines, we used modified Sagem Phones
The ISM frequency band had just been opened in Germany, there were almost no OEM modules for data transfer – all the the protocol handler had to be developed from scratch.
The java programming language was in beta 1995, JDK 1.0 was released 1996. The web-mapping was using Java, the rest like position calculation or position-to-speech (for telephone access to the current location database) was written in C.
Now, almost 20 years later, inexpensive tracking systems are produced in china, fits the purpose but still does not have all the features the TaPos prototype had.
Key is still to manage the tracking data intelligent and efficiently.
Some thoughts about the innovation landscape in Germany and the EU
There was (and I am afraid to say – there still is) no culture in believe in innovation capability in Germany and most of the EU outside industry and academia. They receive the most of innovation funding and produce acceptable results and ease administration.
Some years ago, my only advice to someone who has a bright idea would have been: go directly to the US or find at least US investors – there are a lot of good examples from the past.
Now, there are far more options. Thanks to the www there are many crowd funding platforms which may help to bring a good idea to marked – but be careful who will own your idea at the end of the day and who will benefit.
(Pictures to follow)