Since a while I am doing aerial photography.
On the flying platform, I use mostly an modified Canon S90 to take picture up to altitudes of around 100 Meter. The Camera is stabilized and shutter release, tilt and pan can remotely controlled. The ‘camera view’ is downstreamed via an 5 GHz video link and displayed on a battery powered control monitor.
Video / HDMI control monitor.
However, sometimes it is not necessary to get as high as 100 Meter. A few meter are sometimes sufficient to overlook a crowd or a wedding audience.
But for those occasions, I prefer to use the DSLR. With an monopod to hold the camera up and to release the shutter with the remote-control wireless or per wire works quite well in many situations. Except, that it is ‘guess-work’ if you don’t want to mess around with the control monitor and the cables. And you can’t control more tan the shutter release.
There are also nice options for tethered shooting with the NIKON DSLRs. Sofortbild is a very nice – and free – application if you have an MAC. It controls the camera via the USB port. However, you need an laptop to use the software, there is no iPad or iPhone version available. Another thing to carry and to handle. Not suitable at all occasions.
Since a while, Nikon has wireless adapters for the DSLRs but they are very expensive.
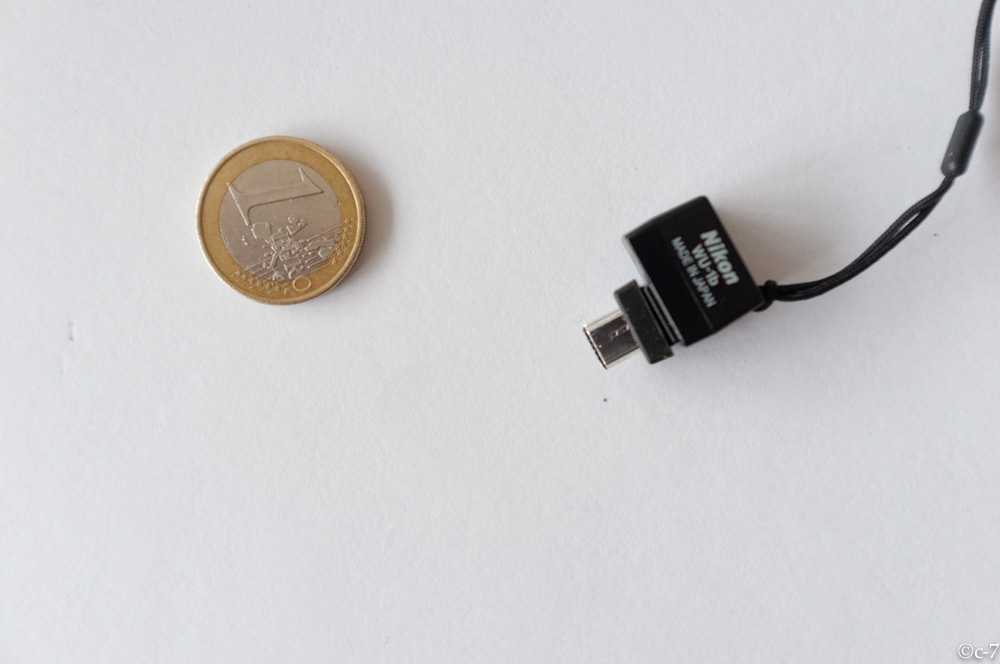
Recently Nikon released the WU-1b which can provide a cheap (50€) solution for remote shooting. It connects to the USB port of the camera.

It is a small dongle.
It provides wireless-hotspot like functionality. After installing the App to you Apple or Android smart device, connect to the wifi hotspot.

You will be able to see the live view picture, set the focus point and release the shutter and – optionally download the pictures directly to your smart device (I don’t recommend this – time consuming).

You also may use a pan – tilt head to control the direction in which you camera points. Cool for concerts or sports events. You can place the camera before the event and control it remotely.
DON’T FORGET TO SECURE THE NETWORK 😉





